GENERACION DE LOS COMPUTADORES
PRIMERA GENERACION
La primera generación de computadoras se lanzó al mercado a mediados del siglo XX, específicamente ente 1946 y 1958, época que generó grandes avances tecnológicos a partir de la búsqueda de un instrumento de ayuda en el ámbito científico y en el militar. Estas computadoras fueron muy notorias y particulares por la magnitud de su tamaño y por el poco poder para adquirir una.
La primera generación de computadoras generada a mediados del siglo XX, contaba con el primer indicio o antecedente de las computadoras modernas, pero entre sus características principales estaba su gran tamaño así como su elevado costo de adquisición y el tema recurrente de fallas y errores por ser experimentales.
Contaban con el uso de tubos al vacío para procesar la información, tarjetas perforadas para la entrada y salida de los datos y programas, y usaban cilindros magnéticos para almacenar información e instrucciones internas.
Las primeras en el mercado tenían un coste aproximado de unos 10.000 dólares. Por ser de gran tamaño, su uso implicaba una gran cantidad de electricidad, generando un sobre calentamiento en el sistema, llegando a requerir sistemas auxiliares de aire acondicionado especial (con el fin de evitar este sobrecalentamiento). Como por ejemplo, el ordenador ENIAC de grandes dimensiones que llegaba a pesar 30 toneladas.
Los ordenadores de primera generación usaban tambores magnéticos como elementos de almacenamiento de datos para ser cambiados luego en la segunda generación por memorias de ferrita.
https://www.youtube.com/watch?v=UmoczcxW_hY




SEGUNDA GENERACION
La segunda generación de computadoras abarcó el período comprendido entre 1959 y 1964. Esta generación marcó una nueva era que se definió por el reemplazo de las válvulas de vacío por los transistores, lo que implicó la creación de computadoras más confiables y con menores necesidades de ventilación, haciéndolas comercialmente accesibles y poderosas. Además, el uso de lenguajes de alto nivel permitió el mejoramiento en la cumplimentación de programas y su uso en sistemas de reservaciones de líneas aéreas, control del tráfico aéreo y simulaciones de propósito general. Las grandes empresas comenzaron a utilizar la computadora en tareas de almacenamiento, registro, manejo de inventarios, nómina y contabilidad.
Características de la segunda generación de computadoras
El invento del transistor hizo posible una nueva generación de computadoras con las siguientes características:
- Fueron construidas con electrónica de transistores.
- Ocupaban menos espacio y producían menos calor que las computadoras que operaban a base de tubos de vacío.
- Más poderosas, más confiables, y menos costosas, lo que las hizo más comerciales.
- Se programaban con lenguajes de alto nivel lo que permitía nuevas utilidades en las que podía utilizarse.
- Utilizaban redes de núcleos magnéticos en lugar de tambores giratorios para el almacenamiento primario, que contenían pequeños anillos de material magnético vinculados entre sí, en los cuales podían almacenarse datos e instrucciones.
https://www.youtube.com/watch?v=znC0ATA5QN4
Tercera generación
La tercera generación de computadoras abarcó un período entre 1964 y 1971. Marcó una nueva era que se definió por el perfeccionamiento de los C.I., es decir, los circuitos integrados creados desde 1958, que son unos chips o pastillas de silicio, que permiten la colocación de enormes cantidades de dispositivos electrónicos en un mínimo espacio, logrando disminuir nuevamente el tamaño de las computadora e incorporando la multiprogramación. Su uso revolucionó la forma de componer computadoras, vigente hasta hoy en día en la fabricación de celulares, calculadoras.
Características de la tercera generación de computadoras


- Mucho más pequeñas.
- Emanaban menor cantidad de calor por lo que se redujeron las necesidades de refrigeración.
- Al ser más pequeñas requerían además de un reducido consumo de energía eléctrica.
- Las interconexiones de los circuitos integrados son mucho más fiables que las conexiones soldadas generando computadoras más flexibles.
- Minicomputadoras, más económicas y con una mayor capacidad de procesamiento
- Teleproceso (procesamiento de datos provenientes de terminales en una unidad central)
- Multiprogramación (técnica en la que dos o más procesos se ejecutan simultáneamente por el CPU mientras se alojan en la memoria principal).
- Renovación de periféricos
- El número π (Pi) se logró calcular arrojando más de quinientos mil decimales.
CUARTA GENERACIÓN DE COMPUTADORES


La denominada Cuarta Generación (1971 a 1988) es el producto del microprocesador de los circuitos electrónicos. El tamaño reducido del microprocesador de chips hizo posible la creación de las computadoras personales (PC). ... El primer microprocesador fue el Intel 4004, producido en 1971.
La característica más importante de las computadoras de la cuarta generación, es sin duda alguna su tamaño, que se debía al uso de la tecnología de microprocesador / VLSI. Gracias a ello, las mismas contaban con otras ventajosas características:
- Mucho menos costosas
- Más portátiles
- Tamaño mucho más pequeño
- Disponibles para cualquier tipo de personas.
- Lenguaje Básico de Computación
- Computer Mouse y GUI hacen que las computadoras sean más agradables
- Más poderosas y confiables que las generaciones anteriores.
- Potencia de procesamiento rápida con menos consumo de energía
- No se requiere aire acondicionad
QUINTA GENERACIÓN DE COMPUTADORES



Su objetivo era el desarrollo de una clase de computadoras que utilizarían técnicas de inteligencia artificial al nivel del lenguaje de máquina y serían capaces de resolver problemas complejos, como la traducción automática de una lengua natural a otra
Características de la quinta generación de computadoras
- Una mayor velocidad y mayor miniaturización de sus elementos.
- La posibilidad de conexiones con cualquier tipo de red como con otros dispositivos, dado a que contaban con puertos de entrada, que hacían posible la salida y la entrada de información.
- La inteligencia artificial permitió el desarrollo de un lenguaje natural, la capacidad para la traducción de diversos lenguajes de forma rápida y con gran eficiencia, así como también, el reconocimiento de palabras generado a partir de la voz. Esta inteligencia también permitió la resolución efectiva de procedimientos matemáticos.
- El uso de dispositivos de almacenamiento .
- La utilización de microprocesadores a partir del requerimiento de reducción al tamaño de los componentes como la unión de varios de éstos, que se interconectaban creando los multiprocesadores. Se concibieron los computadores portátiles o PC, siento estos una miniaturización o simplificación de los computadores industriales.
- El desarrollo de la lectura por voz, característica que permite que el computador se active a través de palabras o frases simples para responder a una actividad o búsqueda.
- Integración de circuitos de entrada y de salida, como por ejemplo, los disquetes o discos flexibles que permitían el almacenamiento efectivo de información.
SEXTA GENERACIÓN DE COMPUTADORES
Se podría considerar que la sexta generación de computadoras tiene su inicio a finales del siglo XX y a principio del Siglo XXI, sin fecha de culminación ya que se considera aún en desarrollo. En efecto, se mantienen los avances tecnológicos de la generación anterior con el fin de mejorarlos y/o expandirlos. Los dispositivos generados poseen la particularidad en común de estar destinados para el consumo personal, lo que ha llevado a que éstos sean simplificados pero a la vez, capaces de realizar varias funciones
Características de la sexta generación de computadoras
- La adecuación hacia el nuevo sistema de Internet
- La necesidad de que el microprocesador funcionase
- Los avances en la memoria
- El desarrollo micro y macro de máquinas
- El incremento de la funcionalidad del Internet
- Los avances multimedia
SEPTIMA GENERACIÓN DE COMPUTADORES
sexta y septima generacion de las computadoras.SÉPTIMA GENERACIÓN: La 7 generación comienza en el año 1999 donde popularizan las pantallas plana LCD 2 y hacen a un lado a los rayos catódicos, en donde se han dejado los DVD y los formatos de disco duro óptico




Características de la séptima generación de computadoras:
- Grandes mejoras en dispositivos internos y externos de los ordenadores.
- La inteligencia artificial pasa a formar parte de los videojuegos y las empresas.
- El problema de calentamiento se soluciona gracias a multitud de dispositivos.
- Internet ahora esta al alcance de “todos”.
- Las pantallas de los ordenadores son mejoradas.
- Por contra, conseguir las mejoras tecnológicas, es más caro.
OCTAVA GENERACIÓN DE COMPUTADORES


No sabemos a ciencia cierta cuando ha comenzado ni tan siquiera si ha comenzado. En este sentido muchas voces parecen datar al inicio de la 8 generación de computadoras al año 2012 pero esto no esta claro.
Cabe destacar que las voces cada vez centran más la fecha de la esta generación a una fecha en donde la nanotecnología se apodere del mercado actual dando un vuelco a la informática tal y como la conocemos. No solo estaríamos hablando de a nivel de informática sino de que esta nanotecnología fuese una especie de unión entre algo vivo y la propia tecnología.
Los dispositivos físicos y mecánicos van a desaparecer osea el disco duro y las tarjetas madre etc.
ya todo sera a base de nanotecnologia. Un disco duro esta limitado en velocidad al tener que estar escribiendo en placas. Pero las nuevas serán orgánicas a base de impulsos electromagnéticos.
La octava generación comienza con el lanzamiento de Nintendo 3DS, el 25 de febrero de 2011, seguido después por el de PlayStation Vita de Sony, que fue lanzada el 17 de diciembre del mismo año y la revisión de la anterior Nintendo 3DS, Nintendo 3DS XL. Oficialmente la octava generación de consolas inicio el 18 de noviembre de 2012 cuando Nintendo sacó a la venta el Wii U debido a que esta es la primera consola de sobremesa de la octava generación.
. Tipos de máquinas
De acuerdo a la cantidad de pasos que requieran para realizar su trabajo:












TEMA 2
LAS MAQUINAS
Una máquina es
un conjunto de elementos móviles y fijos cuyo funcionamiento posibilita
aprovechar, dirigir, regular o transformar energía, o realizar un trabajo con
un fin determinado. Se denomina maquinaria al conjunto
de máquinas que se aplican para un mismo fin .
. Tipos de máquinas
Las máquinas pueden ser clasificadas a partir de diversos
criterios, algunos son:
De acuerdo a su complejidad, que depende de la cantidad de piezas que la compongan:
Sencillas: estas suelen estar compuestas por una sola pieza, como por ejemplo una pinza, un corta uñas o un cuchillo.
Complejas: estas tienen varias piezas, por ejemplo una excavadora o el motor de un auto.
De acuerdo a su complejidad, que depende de la cantidad de piezas que la compongan:
Sencillas: estas suelen estar compuestas por una sola pieza, como por ejemplo una pinza, un corta uñas o un cuchillo.
Complejas: estas tienen varias piezas, por ejemplo una excavadora o el motor de un auto.
De acuerdo a la cantidad de pasos que requieran para realizar su trabajo:
Simples: estas llevan a cabo su trabajo en un solo paso. Esto hace que el modo en que funcionan sea muy fácil de explicar y entender. Algunos ejemplos de estas máquinas son: hacha, tijeras, rueda, rampa o torno. De acuerdo al operador del que derivan, las máquinas pueden dividirse en tres grupos: rueda, plano inclinado y palanca.
Compuestas: para que estas máquinas funcionen necesitan realizar varios trabajos de manera encadenada. Estas están compuestas por varias máquinas simples, que trabajan de manera continuada. En estas máquinas es muy difícil explicar su funcionamiento, algunos ejemplos son la computadora, un satélite, una impresora, etcétera.




Poleas
Una polea es una máquina simple, un dispositivo mecánico de tracción, que sirve para transmitir una fuerza. Consiste en una rueda con un canal en su periferia, por el cual pasa una cuerda y que gira sobre un eje central.
https://www.youtube.com/watch?v=c75migheB-Q

SISTEMAS SIMPLES DE POLEAS CON CORREAS
1. La polea motriz: también llamada polea conductora: Es la polea ajustada al eje que tiene movimiento propio, causado por un motor, manivela,
… En definitiva, este eje conductor posee el movimiento que deseamos transmitir.
2. Polea conducida: Es la polea ajustada al eje que tenemos que mover. Así, por ejemplo: en una lavadora este eje será aquel ajustado al tambor que contiene la ropa.
3. La correa de transmisión: Es una cinta o tira cerrada de cuero, caucho u otro material flexible que permite la transmisión del movimiento entre ambas poleas. La correa debe mantenerse lo suficientemente tensa pues, de otro modo, no cumpliría su cometido satisfactoriamente.
Según el tamaño de las poleas tenemos dos tipos:
1. Sistema reductor de velocidad: En este caso, la velocidad de la polea conducida ( o de salida) es menor que la velocidad de la polea motriz (o de salida). Esto se debe a que la polea conducida es mayor que la polea motriz.
1. Sistema reductor de velocidad: En este caso, la velocidad de la polea conducida ( o de salida) es menor que la velocidad de la polea motriz (o de salida). Esto se debe a que la polea conducida es mayor que la polea motriz.
En el siguiente vídeo se puede apreciar un mecanismo reductor de poleas con correa. Observa como la polea motriz es menor que la polea conducida la cual gira a mayor velocidad.
Con la correa cruzada se puede lograr que el sentido de giro de la polea conducida sea contrario al de la polea motriz.
El sistema de poleas con correa más simple consiste en dos poleas situadas a cierta distancia, que giran a la vez por efecto del rozamiento de una correa con ambas poleas. Las correas suelen ser cintas de cuero flexibles y resistentes. Es este un sistema de transmisión circular puesto que ambas poleas poseen movimiento circular.
En base a esta definición distinguimos claramente los siguientes elementos:
RELACIÓN DE VELOCIDADES SISTEMA DE POLEAS CON CORREA
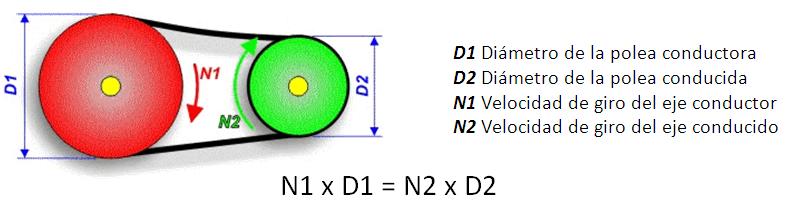
La transmisión de movimientos entre dos ejes mediante poleas está en función de los diámetros de estas, cumpliéndose en todo momento:
- Posibilidades en un sistema de poleas con correaTeniendo en cuenta la relación de velocidades que se establece en función de los diámetros de las poleas, con una adecuada elección de diámetros se podrá aumentar, disminuir o mantener la velocidad de giro del eje conductor en el conducido.Disminuir la velocidad de giroSi la el diámetro de la polea motriz es menor que el diámetro de la polea conducida, la velocidad de giro del eje conducido será menor que la del eje motriz.

- Aumentar la velocidad de giroSi la polea motriz tiene mayor diámetro que la conducida, la velocidad de giro aumenta.

- Invertir el sentido de giroEmpleando poleas y correas también es posible invertir el sentido de giro de los dos ejes sin más que cruzar las correas.

- Definimos la relación de transmisión (i) como la relación que existe entre la velocidad del eje conducido (N2) y la velocidad del eje motriz (N1).

 Expresión que es válida para todos los sistemas de transmisión circular que se tratarán en adelante.La relación de transmisión, como su nombre indica, es una relación de dos cifras, no una división.
Expresión que es válida para todos los sistemas de transmisión circular que se tratarán en adelante.La relación de transmisión, como su nombre indica, es una relación de dos cifras, no una división. - Ejemplo 1 Supongamos un sistema de modo que:N1 = velocidad de la polea motriz (entrada) es de 400 rpm.N2 = velocidad de la polea conducida (salida) es de 100 rpm.Hallar la relación de transmisión y determinar si el sistema es reductor o multiplicador.En este caso, la relación de transmisión es:
 Una relación de transmisión 1:4 significa que la velocidad de la polea conducida es cuatro veces menor que la de conductora. Es un sistema reductor de velocidad.
Una relación de transmisión 1:4 significa que la velocidad de la polea conducida es cuatro veces menor que la de conductora. Es un sistema reductor de velocidad. - Ejemplo 2: Supongamos un sistema de modo que:N1 = velocidad del eje motrizr es de 200 rpm.N2 = velocidad del eje conducido es de 500 rpm.Hallar la relación de transmisión y determinar si el sistema es reductor o multiplicador.En este caso, la relación de transmisión es:
 Una relación de transmisión 5:2 significa que la velocidad del eje conducido es cinco veces mayor que la del eje conductor.
Una relación de transmisión 5:2 significa que la velocidad del eje conducido es cinco veces mayor que la del eje conductor. - La relación de transmisión también se puede calcular teniendo en cuenta el tamaño o diámetro de las poleas.
 D1 = diámetro de la polea motriz.D2 = diámetro de la polea conducida.Se puede calcular la velocidad de los ejes a partir de los tamaños de las poleas.N1 * D1 = N2 * D2
D1 = diámetro de la polea motriz.D2 = diámetro de la polea conducida.Se puede calcular la velocidad de los ejes a partir de los tamaños de las poleas.N1 * D1 = N2 * D2 - Ejemplo:Se tiene un sistema de poleas de modo que la polea conducida tiene 40 cm de diámetro y la motriz 8 cm de diámetro. Si el eje motriz gira a 200 rpma. Halla la relación de transmisiónb. Halla la velocidad del eje conducidoc. ¿Es un reductor o un multiplicador?
- Datos:N1 = velocidad del eje motriz es de 200 rpm.N2 = velocidad del eje conducido es la incógnitaD1 = diámetro de la polea motriz es 8 cmD2 = diámetro de la polea conducida es 40 cmSolucion
 b. N1 * D1 = N2 * D2
b. N1 * D1 = N2 * D2
- 200 rpm * 8 cm = N2 * 40 cmN2 = = 40 rpmVelocidad del eje conducido es 40 r.p.m.c. Es un reductor porque la velocidad del eje conducido es menor que la velocidad del eje de motriz (N2 < N1).







LA PALANCA
https://www.edu.xunta.es/espazoAbalar/sites/espazoAbalar/files/datos/1464947673/contido/21_la_palanca.html
https://www.edu.xunta.es/espazoAbalar/sites/espazoAbalar/files/datos/1464947673/contido/21_la_palanca.html
Fuerza resistente. F: Fuerza actuante. dR: Distancia de R al punto de apoyo. dF: Distancia de F al punto de apoyo.
La palanca es una máquina simple cuya función es transmitir fuerza y variar desplazamiento. Está compuesta por una barra rígida que puede girar libremente alrededor de un punto de apoyo denominado fulcro.
Las palancas están presentes, no solo formando parte de las máquinas, sino en multitud de objetos de la vida cotidiana. Podemos clasificarlas en función de la posición de la fuerza actuante F y de la resistente R en tres clases, grados o géneros.
Palancas de primer grado (género o clase).
Son aquellas en las que el punto de apoyo está entre la fuerza aplicada y la fuerza resistente.
El efecto de la fuerza aplicada puede verse aumentado o disminuído en función de las distancias al punto de apoyo.
Palancas de segundo grado (género o clase).
La fuerza resistente se aplica entre el punto de apoyo y la fuerza aplicada.
Palancas de tercer grado ( género o clase).
La fuerza aplicada está entre el punto de apoyo y la fuerza resistente.
A continuación tienes una tabla resumen con los parámetros característicos de cada tipo de palanca, y su aplicación a un ejemplocotidiano:
Tipos de palancas. Jesús Lozano Monge y Francisco J. Soria López
https://www.edu.xunta.es/espazoAbalar/sites/espazoAbalar/files/datos/1464947673/contido/21_la_palanca.html
LEYES DE LAS PALANCAS
mira estos clic de video
https://www.youtube.com/watch?v=mUFF-T-KUZs
https://www.youtube.com/watch?v=NayRdsG9UTM
https://www.youtube.com/watch?v=2Ktqvws6K1M&t=23s
https://www.youtube.com/watch?v=NayRdsG9UTM
https://www.youtube.com/watch?v=2Ktqvws6K1M&t=23s
Este material pedagógico esta diseñado basado en las siguientes biografías digitales y no digital. Y los link citados en el blog
Educación en tecnologia , autores; Gomez olalla, Silva rodríguez y otros, edt. Mc Graw Gill